私たちの大変複雑な身体運動システムはいくつかのレベルの事前準備がないと上手く動いてくれないのですが、状況の急変にも対応しなくてはいけません(場合によってはその場しのぎも・・)。
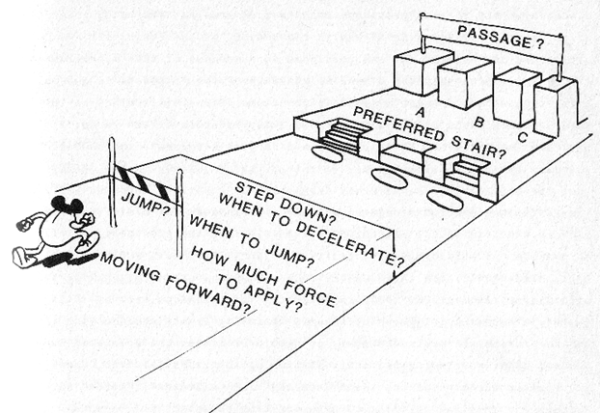
下図は1984年にTurveyとKuglerが「知覚と行動への生態学的アプローチ」という論文の中の多様な解釈のできる興味深い図です。移動する動物のその時点での状況によって視覚から得られる情報の意味するものが異なり、スピードがあれば「登れる階段」も躓いたりすると「登れない階段」になります。
テニスで、相手の打ったボールが「ネットイン」したときに ”これは拾える” とか ”これは無理だ” と判断する根拠は、自分のダッシュ力や足の疲労感、更には次のプレーの展開予想など様々な要因が関与します。相手の立ち位置とかかわって、”拾えそうなので取りあえず深い球を返して次に備える?” ”いやネット際へドロップショットで返してエースをとる” ”返球したところで相手にまた攻められる” などなどの様々な対応可能性があり、「その場しのぎ」といいつつも瞬時に様々な対応をしているようです。
東京大学の多賀厳太郎先生は、「神経系」と「身体系」と「環境系」の相互作用のなかで、トップ・ダウンとボトム・アップの反復により身体システムが再編されるとして、「神経系」が運動司令を出し「身体系」が司令を受け「環境系」が外乱をもたらす、という固定的な枠組みではないことを指摘します。そして、個々のシステムの「一番遅い系」に拘束される ”スレイビング” から、全体が共同して新しいシステムを生み出す ”シナジェティックス” の重要性を指摘しています。
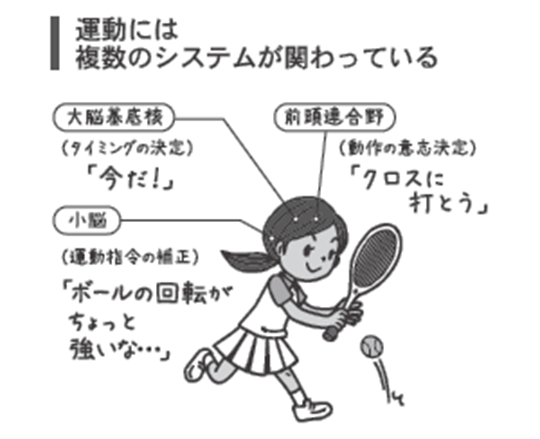
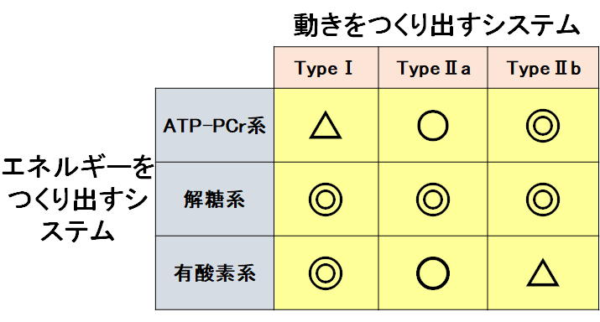
このメカニズムには大脳皮質の「運動野」だけではなく「感覚野」と「前頭連合野」「小脳」と「大脳基底核」「運動神経」と「感覚神経」「脊髄」「筋」「用具」「環境情報」など多くの要因を含んでおり、練習を反復することによりこれらの要因が「エネルギーをつくり出すシステム」も改善しながら「新秩序」をもたらしてくれるようなのです。