私たちの「動きをつくり出すシステム」は大変巧妙にできていて膨大な数の骨と関節と筋を協調させています。なぜこのようなことが可能なのでしょうか?
有名なロシアの生理学者ベルンシュタイン先生は、1940年代に「動作構築のレベル」という理論を示しました。進化の系統性を反映していて、緊張と姿勢のレベルA、筋-関節のリンク(シナジー)のレベルB、空間のレベルC、行為のレベルD、と高度化してゆきます。レベルAは「背景緊張(トニック)」として姿勢制御を支え、レベルBは、レベルAでの姿勢を基本に筋と関節の連動によって「動作」として「相動性(フェイジック)」に動かします。レベルCは、これらの動作を空間状況に応じて適切に「配置して終了させる」ものであり、最後のレベルDは、これらの連鎖を繋げて課題解決や達成を行う一連の「行為」です。例えて言えば、良い姿勢(A)を保った疾走動作(B)で400m(C)を走ろうとしても、適切なペース配分を支える複数の動作選択をする連鎖がなければ良いタイム(D)は生まれないのです。このレベルAとBはおそらく「言語的意図」は関与せず(無意識)、レベルCとDでは「言語的意図」が関わっているようです。
1960年代後半ロシアのシック先生たちは「首なし猫」を使った移動実験の結果を発表し世界に衝撃を与えました。脳を幾つかのレベルで切断すると、ランニングベルトの上で胴体を固定された猫が歩いたり走ったりするのです。そしてベルトの速度が速くなると歩行からギャロップに動作が変わり、速度が遅くなるとギャロップから歩行に戻り、かつ動作が変わる速度はそれぞれ異なっているのです。
歩行や走行の制御は、CPG(中枢動作発現機構)で決まっているのですが、状況に応じて私たちの重たい身体の動作様式を変える戦略(基本的には保守的・・ギリギリまで速く歩き、ギリギリまでゆっくり走る)が異なるようで、私たちの身体システムは大変柔軟にできていているようです。私たちの身体は「あまりにも複雑にできている」ので何らかの「事前準備」システムがないと上手く動いてはくれないようなのです。
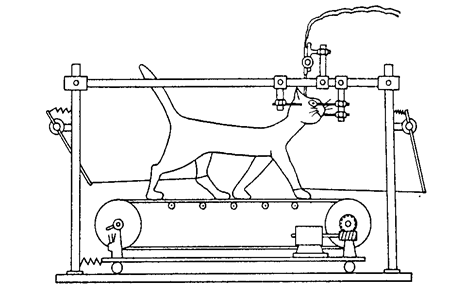
(図は、伊藤正男、脳の設計図、中央公論社、1980より)